
Imagem: Divulgação
 Uma nova abordagem na concepção de robôs extremamente miniaturizados, batizados de "microides", poderá permitir a fabricação de robôs do tamanho de formigas e capazes de operar de forma autônoma ou coordenada, como as colônias de insetos.
Uma nova abordagem na concepção de robôs extremamente miniaturizados, batizados de "microides", poderá permitir a fabricação de robôs do tamanho de formigas e capazes de operar de forma autônoma ou coordenada, como as colônias de insetos.
A grande vantagem do novo projeto é que os robôs em miniatura movimentarão suas minúsculas pernas e mandíbulas usando músculos artificiais de estado sólido, dispensando qualquer tipo de motor ou engrenagem.
Robôs sem partes móveis
Avançadas simulações computacionais indicam que esses insetos artificiais teriam uma destreza significativamente maior do que os atuais robôs em microescala.
Os robôs também poderão ser capazes de explorar a energia vibratória do meio ambiente para recarregar suas baterias, permitindo que eles funcionem mesmo em ambientes sem luz.
O maior ganho da nova abordagem é a eliminação dos complexos sistemas móveis dos microrrobôs construídos até hoje. Essas partes móveis desgastam-se rapidamente pelo atrito ou podem travar totalmente com um simples grão de poeira.
"A complexidade das partes móveis em última instância limita a sua vida útil e restringe seu uso a ambiente controlados de laboratório," afirma Jason Clark, da Universidade Purdue, idealizador do novo design dos microrrobôs.
Robôs-insetos
Os resultados das simulações são tão promissores que a universidade requisitou uma patente para o conceito e já ofereceu os recursos para a construção dos primeiros protótipos.
"Como os microides são de estado sólido, sem quaisquer peças discretas, como engrenagens que se desgastam devido ao atrito, eles provavelmente serão duráveis e robustos. Mesmo se você pisar em um microide, ele irá simplesmente se levantar e ir embora," estima Clark.
"Os microides serão capazes de andar, correr, pular, e pegar e mover objetos com peso muitas vezes superior ao seu próprio," disse Clark. "Um microide também poderá fazer o que nenhum inseto ou microrrobô consegue fazer, que é continuar andando mesmo se virar de costas. Quem sabe, a próxima característica seja a capacidade de voar."
Os pequenos robôs deverão andar no formato "tripé", como a maioria dos insetos - somente três das seis pernas tocam o solo de cada vez - o que os permitirá andar sobre terrenos totalmente irregulares, como terra ou areia.
 Músculos artificiais piezoelétricos
Músculos artificiais piezoelétricos
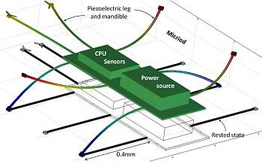
Cada perna ou mandíbula dos microides é feito com um aglomerado de finas tiras de material piezoelétrico, que geram eletricidade quando comprimidas. Até mesmo a vibração do ambiente no qual os microrrobôs estarão andando será suficiente para gerar a energia necessária para seu funcionamento.
Aqui o projeto parece fazer uma grande diferença. Materiais piezoelétricos e músculos artificiais estão disponíveis há anos, mas normalmente eles não se expandem o suficiente, e nem rapidamente o bastante, para viabilizarem a construção de robôs práticos.
Mas as simulações indicam que o novo design supera essa limitação: quando três tiras são unidas apenas nas duas extremidades, a aplicação de uma tensão em uma ou mais delas produz um movimento lateral surpreendentemente grande.
Microrrobôs inspirados em insetos
No momento, os pesquisadores estão passando das simulações computadorizadas à prática, construindo os primeiros microides. Como são de estado sólido, podem ser fabricados com a mesma tecnologia utilizada pela microeletrônica convencional.
Outros conceitos de microrrobôs inspirados em insetos e capazes de trabalhar conjuntamente incluem os microrrobôs do projeto I-Swarm formigas robóticas capazes de construir casas em Marte e as colônias de nanitos.